Lab05: Inverse kinematics
The goal is to implement numerical inverse kinematics for arbitrary planar manipulator and analytical inverse kinematics for RRR manipulator.
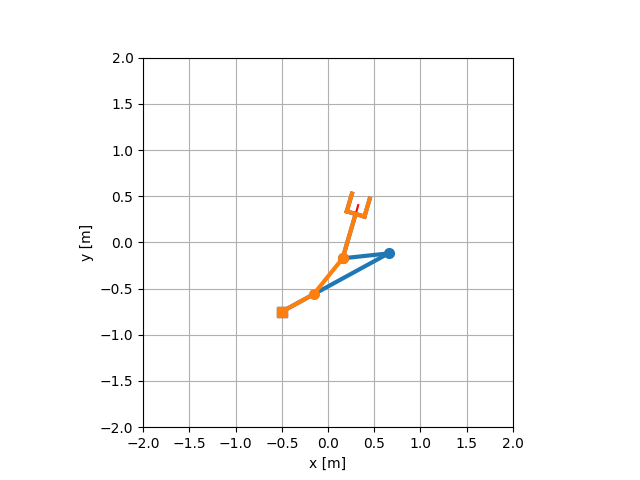
Numerical IK
Generated by a script exercise/lab05/01_numerical_ik.py:
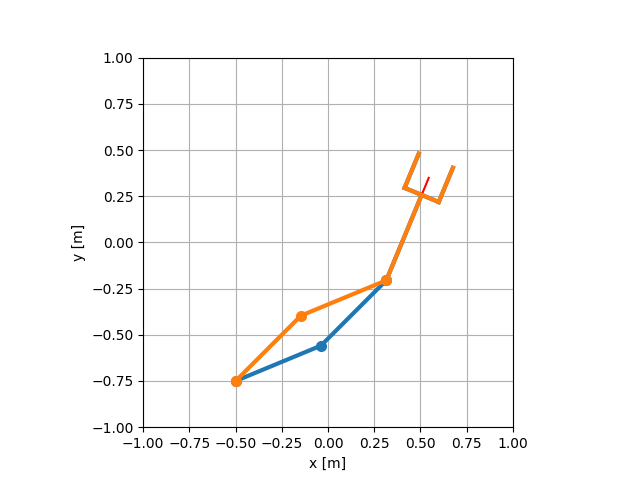
Analytical IK
Generated by a script exercise/lab05/02_analytical_ik.py:
RRR (mandatory)
PRR (optional)
Tests
Mandatory HW:
- robotics_toolbox/robots/planar_manipualator.py
implement numerical IK in ik_numerical functions
implement analytical IK of RRR manipulator in ik_analytical functions
Optional HW:
- robotics_toolbox/robots/planar_manipualator.py
implement analytical IK of PRR in ik_analytical functions
If following tests will pass, your implementation is correct:
`bash
pytest tests/hw05/mandatory
pytest tests/hw05/optional
`
At the end of the lab, you should answer the following questions:
how many solutions numerical/analytical IK have?
why analytical solution is not used for high DoF robots?